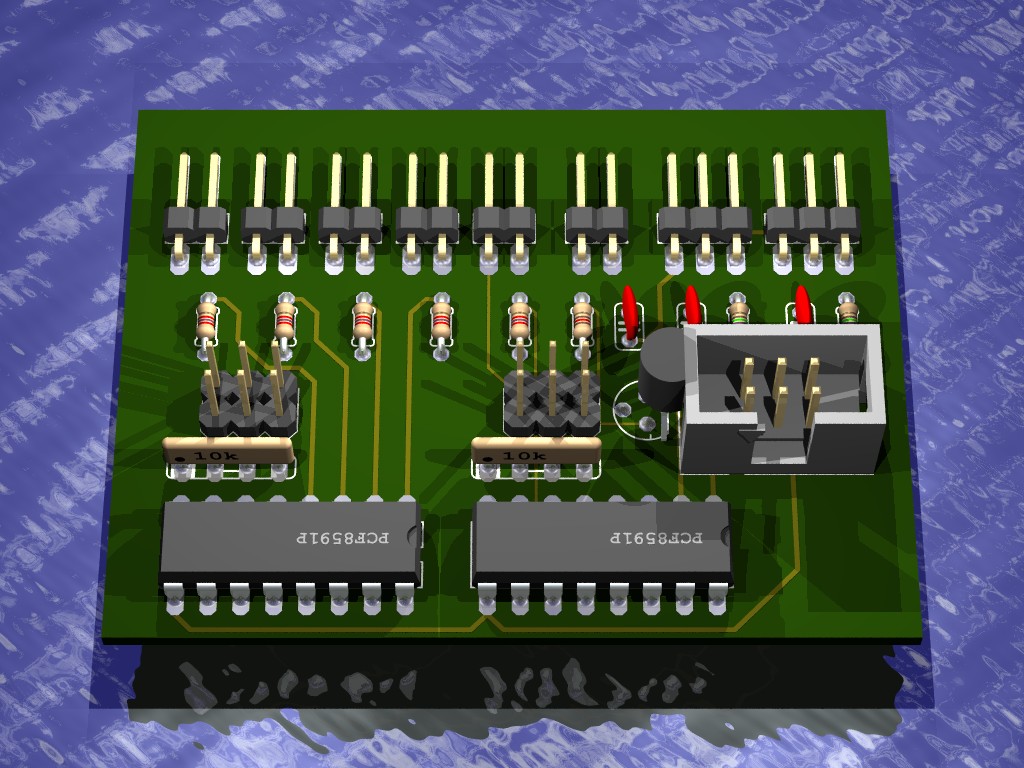
Mit Hilfe von Eagle3D kann für eine Leiterplatte eine 3D-Ansicht generiert werden. Leider ist bei der aktuellen Version kein Bauteil für das Dog-M Display vorhanden.
Hier also eine Definition für das DOG-M Display für Eagle3D.

Zur Installation muss unten stehende Definition in user.inc eingefügt werden:
#include "connector.inc"
#macro DISPLAY_DOGM(value)
union{
// upper pin row
object{IC_DIS_PIN() rotate<0,180,0> translate<0,-3.75,0>}
object{IC_DIS_PIN() rotate<0,180,0> translate<2.54,-3.75,0>}
object{IC_DIS_PIN() rotate<0,180,0> translate<5.08,-3.75,0>}
object{IC_DIS_PIN() rotate<0,180,0> translate<7.62,-3.75,0>}
object{IC_DIS_PIN() rotate<0,180,0> translate<10.16,-3.75,0>}
object{IC_DIS_PIN() rotate<0,180,0> translate<12.700,-3.75,0>}
object{IC_DIS_PIN() rotate<0,180,0> translate<15.240,-3.75,0>}
object{IC_DIS_PIN() rotate<0,180,0> translate<17.780,-3.75,0>}
object{IC_DIS_PIN() rotate<0,180,0> translate<20.320,-3.75,0>}
object{IC_DIS_PIN() rotate<0,180,0> translate<22.860,-3.75,0>}
object{IC_DIS_PIN() rotate<0,180,0> translate<25.400,-3.75,0>}
object{IC_DIS_PIN() rotate<0,180,0> translate<27.940,-3.75,0>}
object{IC_DIS_PIN() rotate<0,180,0> translate<30.480,-3.75,0>}
object{IC_DIS_PIN() rotate<0,180,0> translate<33.020,-3.75,0>}
object{IC_DIS_PIN() rotate<0,180,0> translate<35.560,-3.75,0>}
object{IC_DIS_PIN() rotate<0,180,0> translate<38.100,-3.75,0>}
object{IC_DIS_PIN() rotate<0,180,0> translate<40.640,-3.75,0>}
object{IC_DIS_PIN() rotate<0,180,0> translate<43.180,-3.75,0>}
object{IC_DIS_PIN() rotate<0,180,0> translate<45.720,-3.75,0>}
object{IC_DIS_PIN() rotate<0,180,0> translate<48.260,-3.75,0>}
// lower pin row
object{IC_DIS_PIN() rotate<0,0,0> translate<0,-3.75,-27.940>}
object{IC_DIS_PIN() rotate<0,0,0> translate<2.54,-3.75,-27.940>}
object{IC_DIS_PIN() rotate<0,0,0> translate<45.72,-3.75,-27.940>}
object{IC_DIS_PIN() rotate<0,0,0> translate<48.260,-3.75,-27.940>}
// display case
box {<-2.54,0.5,1.27>,<50.8,3,-26.67> texture{col_silver}}
// text on display
box {<-2.54,0.5,1.27>,<50.8,3,-26.67> pigment{White}}
text {ttf besch_font value 0.2, 0 pigment { Gray60 } rotate <90,0,0> scale<3,1,3> translate<13.1,3.21,-10>}
// translate part
translate<-26.67,0,16.51>
}
#end